
One of the great things about meetups is their ability to generate weird idea exchanges. Late last year I demonstrated ThreeBody – another of my oddball, limited appeal physics apps. I was mentioning that it might be fun to see what happens to the three body problem in a spherical space – since this would solve the “ejection to infinity” issue by removing infinity. This led to a discussion about the topology of games like asteroids where the top/bottom and left/right are wrapped. This mapping creates a space that is a topological torus. This was the spark I needed to think more carefully about what motion on a real torus would be like.
I don’t need much of an excuse to think about an odd physics scenario. My past includes time spent taking a break from the working world and doing a PhD involving curved spacetimes. One of the problems that comes up in such studies as a way of sharpening skills is the study of motion on curved 2D surfaces. It is a great place to learn to use the mathematical machinery and intuitive enough that the answers can be visualized.
This made me wonder how different a space shooter would be if the physics of a torus was made “technically correct” (the best kind of correct) . The result is a soon to be released game “Geodesic Asteroids” in which there is a dual view of the 3D motion and the 2D motion with the paths of objects moving in a “technically correct way”.
The Torus
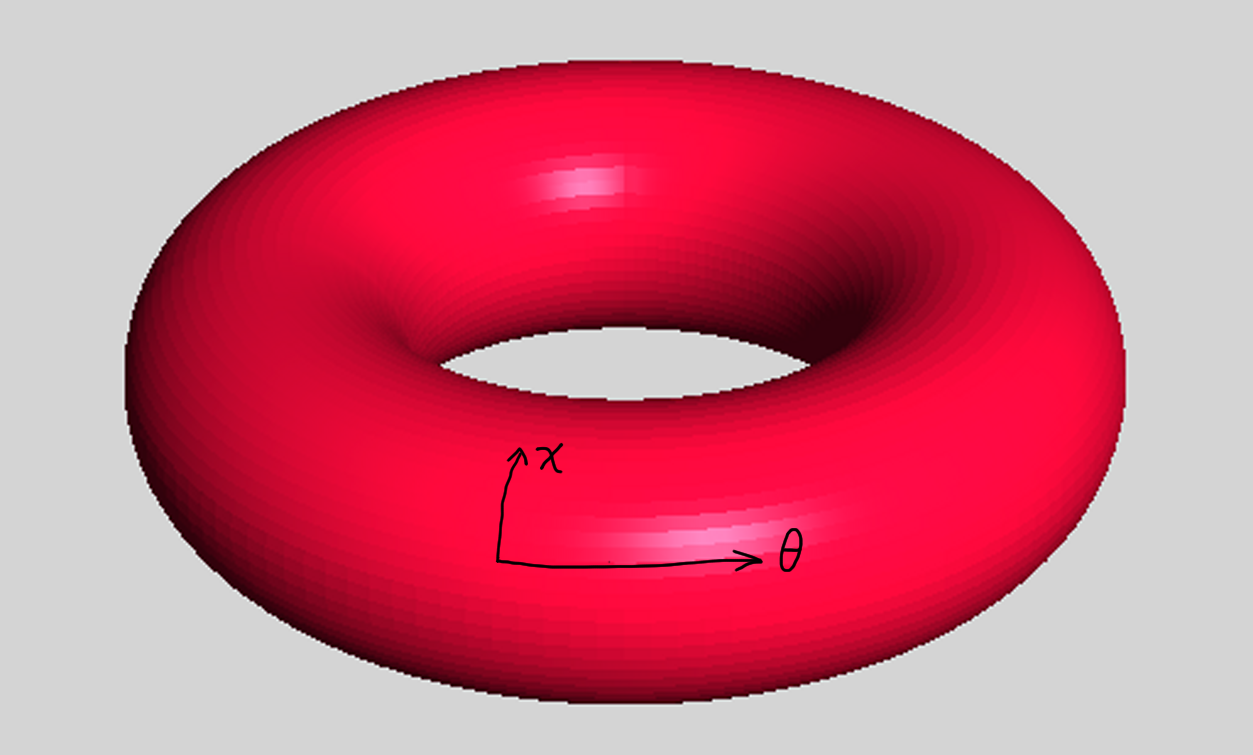
Figure 1: Torus coordinates
First we need a mathematical description of the torus. It is a 2D surface so only two co-ordinates ")




In the mathematics for a torus, everything can be described in terms of these co-ordinates, including the equations of motion that define how an object moves when there is no force on it. We are accustomed to thinking of the torus as a three dimensional object but exactly which three dimensional shape results is partly due to the choice made when we embed the surface in 3D. There is really no reason we have to do this but it can help our intuition. [Digression: It an interesting mathematical question about exactly how may dimension are required to embed an N dimensional surface, we are accustomed to N+1 for e.g. spheres and torii but this is not the general rule!].
In our case we pick a customary embedding:
$$x = (a + b \cos{\chi}) \cos{\theta}$$
$$y = (a + b \cos{\chi}) \sin{\theta} $$
$$z = b \sin{\chi} $$
This allows us to map
What about a 2D map of this torus? Here I elected to just use
Motion on the torus
The embedding equation provides the world space position to show events on the torus. What equations should be used to calculate motion on the torus? The motion takes place on the torus so the description is in terms of 

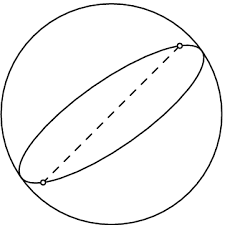
As you know from looking at maps of airplane flights, the lines between points take what seem to be curves on the map. This is because the force-free (or geodesic) path that connects two points is a great circle. This means if you are in New York and head directly west the geodesic path must be a diameter of the circle and will carry you into the southern hemisphere until you are at the antipodal point directly opposite New York through the center of the earth. [Fun fact: very few places on land have an antipodal point on land]. You started out with only a velocity in the
$$a_{\theta} =v_{\phi} v_{\phi} \sin{\theta} \cos{\theta} , a_{\phi} = \frac{-2 v_{\theta} v_{\phi}}{\tan{\theta}} $$
For a torus the equations are:
$$a_{\theta} = \frac{2 \sin{\chi} v_{\chi} v_{\theta}}{b (a + b \cos{\chi})}, a_{\chi} = – \frac{2 \sin{\chi} v_{\theta}^2}{(a + b \cos{\chi})} $$
The good news is that on the torus the co-ordinates are well behaved. The expression are finite. (If you look at the equations for the sphere you’ll see it is possible for some values to be dividing by zero. Never a great idea. This is not a fundamental part of motion on a sphere, there is no special place where acceleration goes to infinity. It’s just a bad choice of co-ordinates and we need to choose a different origin in some case. It is quite usual to have to cover a surface with several co-ordinate patches. For the torus we are lucky that this is not needed.)
Where did those equations come from?
The equations for 
It’s not my goal to turn this post into a treatise on differential geometry. It is a very interesting subject and is the stage on which Einstein’s General Theory of Relativity takes place. All the introductory GR texts start with some background in differential geometry and I find their approach more geared to my interest than the way math books approach the subject. For those interested in a good introduction to the geodesics of the torus and an introduction to the basics of differential geometry, I recommend Jantzen’s paper. My favourite intro GR book is Schutz’s “A First Course in General Relativity”
Differences between 2D and 3D representations
A space game on a torus can be shown in 3D but it is also interesting to play the game on the 2D representation of the surface. Here the odd paths of the objects make the impact of the curved surface apparent. There are some compromises in mathematical purity that I have made in the interests of actually finishing the game. The primary one is that the size of objects in the 2D and 3D view cannot be fully reconciled (more below).
On the true mathematical surface the distance travelled as you walk around the outside diameter is different from the inside diameter. On the 2D map this means that the top edge of the map should not be as wide as the middle. Our choice of a 2D map is therefore vulnerable to the an effect similar to that occurring on a Mercator projection of the Earth (Greenland is shown as far too big). I have chosen a simple scaling depending on the “latitude”
True scaling leads to some weird paths in the map view. If an object is moving quickly in
Geodesic Asteroids is available on Blackberry, iOS and Android. It has been great fun to think about and use the geodesic math I learned long ago. It is also the first time I have written a more “video game” style game. Hope you’ll find it interesting.
[social4i size=”large” align=”float-right”]