
The Static Three Body Problem
{kind=link}
The gravitational interaction of three bodies is fantastically and unexpectedly complex. On the surface the problem is very simple – find a solution for how each body moves subject to the gravity of the other two. The system is not affected by anything outside so energy and angular momentum are conserved. Surely there is enough information here to find general mathematical properties of the solutions. Can we say the objects will always stay within some distance of each other? Gravity is attractive – that seems a reasonable thing to try and prove.
Many of the greats have wrestled with the three body problem. Newton worked on the interactions of the sun, earth and moon and became obsessed with the problem. After much effort he gave up, complaining to Halley that no other problem had made his head ache so much. Other greats investigated and made some progress by simplifying the problem to some special cases (e.g. the restricted circular three body problem) but the general problem remained unsolved until a formal mathematical solution was found in the early 20th century by Sundman. It takes the form of a very, very long series of terms and is not of much practical use. Interestingly it also assumes the angular momentum is non-zero and does not apply to the static three body problem.
When cleverness fails, brute force can sometimes succeed. Cheap computation has allowed an “experimental approach” to the the three body problem. Computer simulations have allowed searches for stable or somewhat stable solutions to be found[ref]http://arxiv.org/pdf/1303.0181v1.pdf[/ref]. There have been more three body solutions found in the past 30 years than in the 300 years before.
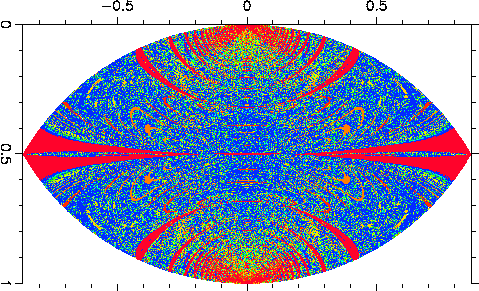
Recently, the solution space of the static three body solution was mapped out using about 200,000 separate simulations[ref]http://arxiv.org/pdf/0805.2844.pdf This paper has a number of interesting illustrations and is very approachable[/ref]. The scientists considered a standard configuration of two unit masses placed 1 unit apart and then looked at how the system evolved when the third unit mass was added nearby. They then coloured each point based on how long the system took before a body was ejected. A key result of their paper is shown in figure 1
Figure 1. The life time of gravitational three body systems containing all possible of orbits that were initially at rest. The initial configuration of the three body system is such that one star is located at (0, 0), the second one at (1, 0), and the third one at a coordinate (x, y). The colour pixel at (x, y) shows then the time elapsed from the initial configuration to the disintegration of the system under Newtonian gravitation. Red denotes short lived systems, decaying within one crossing time, orange systems decaying before two crossing times, etc. The dark blue colours represent systems with the longest lifespans (over 13 initial crossing times). The pixel size is 1.25 · 10−3 .The image of the complete shield is symmetric, because we start with all three objects at rest. Note the wide resonant bands causing a rapid disintegration of the system. Also note how narrower bands abound between wide bands. Copyright MNRAS, used in accordance with their policies.[ref] http://mnras.oxfordjournals.org/content/388/3/965.full Published version of the paper in the preceding footnote[/ref].
It is interesting that initial points which are nearby can have very different evolution times. This is a hallmark of a chaotic system. Small differences in initial conditions result in solutions that diverge over time. This is one of the key characteristics of the system that make general mathematical statements difficult.
The ThreeBody app allows you to explore the space of solutions. The evolution of triple binary systems is also available for exploration – technically a six body problem. Take a look and see if that changes anything.
Hi, I recently acquired GE 9.0 and am enjoying using it so far.
I am wondering if it’s possible to use the ThreeBody module (or alternate modules in GE) to set up a three-body Earth/Moon synodic system with a satellite. I realize this goes somewhat counter to the N-Body physics that GE is intended to simulate, but I was curious to know if I could set up the same scene in different coordinate systems.
I think the scene used to demonstrate Lagrange points might be useful here (Demos/Scenes/LagrangePoints). This scene sets up a star and a planet and uses the CorotatingCamera component to give a view that co-rotates with the planet. This will give you a scene with the the Earth-Moon line fixed. There are corresponding trail rendered that take into account the co-rotating frame.
If you have more questions please let me know at nbodyphysics@gmail.com
Thank you, I’ll take a look at those scenes!