
Even though I already have a sizable collection of books on orbital mechanics I cannot
resist adding more. Recently two new books came to my attention and inevitably the references in one of them led me to a third book. Here is a brief overview based on a “reading” (i.e. not studying in depth) of the first two and a browse through of the third.
They are very different in approach and scope and both very worthwhile.
Moving Planets Around

Moving Planets Around is a fantastic resource to get started with N-body gravitational simulations. It is strongly motivated by the on-line book by Hut and Makino “Moving Stars Around” circa 2003. Hut and Makino has a warm place in my heart since it was one of the key resources I used when creating the original N-body code that led to Gravity Engine.
Moving Planets Around begins with the same premise of building an N-body simulator from scratch and builds up to a modern scenario of examining the stability of moons in exoplanet systems. It starts at a very basic level and goes from Newton’s gravity and the two body problem into three body dynamics. As is appropriate for this subject is also spends a significant amount of time on the details of how to evolve these equations numerically, covering the essential numerical techniques used in this field.
All of this is done in a literally conversational tone. The book is written as a dialog between two graduate students Alice and Bob working on a project from scratch with the assistance of Professor Starmover. At first this is a bit distracting but it has some advantages in that it allows some “wrong-turns” to be brought forward and discussed in a very natural manner. This dialog approach was one of the key features of “Moving Stars Around”.
If you have any interest in the issues that come into play when doing numerical modelling of small planetary systems, this is an exceptionally approachable book. All the code examples are in Python and an accompanying GIT project provides them all on line. The code is GPL, so while I find it useful as a source of ideas I have not downloaded it or made use of it in my Gravity Engine project.
Dynamics of Planetary Systems
![Dynamics of Planetary Systems (Princeton Series in Astrophysics) by [Scott Tremaine]](https://m.media-amazon.com/images/I/41KT0-+qJkL._SY346_.jpg)
The other VERY new book I have read the first half of is “Dynamics of Planetary Systems” by Scott Tremiane (emeritus professor at the Institute for Advanced Study). When I saw this book as a pre-order on the Princeton University Press website I immediately ordered it. Tremaine is a giant in the field and with Binney wrote “the book” an the motion of stars in galaxies “Galactic Dynamics”. I was not disappointed.
The book is ultra-modern and pragmatic in it’s view-point. Tremaine points out that many of the earlier treatments of planetary systems involved long and tedious treatments of how planetary orbits are perturbed by other planets and in the modern age this is either done with computer algebra or numerical modelling. [I can attest to the length of these calculations, having done them as exercises at one point.]
Whereas “Moving Planets Around” is a very friendly introduction for the novice, “Dynamics of Planetary Systems” is an amazing resource for a graduate student or senior undergrad in physics. It covers the basics of orbits as a warm up and then gets into the real fun of three body systems and beyond.
The nuggets of wisdom I have tagged for further study include:
- the gold standard for planetary dynamics simulations is REBOUND [LINK] (again GPL, so nothing I wish to download)
- there is no “one size fits all” numerical integration algorithm. The choice depends on the number of bodies and the timescale required. There are special purpose techniques when interested in the long term stability of the solar system.
- spin-orbit resonances and tides are very cool. I *really* need to spend some time with these chapters!
Celestial Mechanics and Astrodynamics: Theory and Practice
![Celestial Mechanics and Astrodynamics: Theory and Practice (Astrophysics and Space Science Library Book 436) by [Pini Gurfil, P. Kenneth Seidelmann]](https://m.media-amazon.com/images/I/51nBO9iYOWL._SY346_.jpg)
This book was referenced in “Moving Planets Around”. The title caught my attention since all the other books on my bookshelf have title that mentions either celestial mechanics or astrodynamics, so a title that mentions both is immediately interesting to me.
First the book is a bit pricy. My book collection “bug” means I am on the mailing list for many of the technical book providers and Springer, in particular, has occasional amazing sales (in the 40-50% range). There is usually a 50% off sale around Christmas, and nothing says Christmas more than a shiny blue graduate-level physics book! In the case of this book I was able to get 40% off.
Ok, the book.
First, it covers a lot of material. Some of this is in enough depth to be all you need and in other cases its purpose is to make you aware of a field. For example when discussing stability of orbits it has a brief discussion on Poincarre sections that is largely a pointer to other work.
There are some things described in detail here that I have not seen elsewhere in my orbital mechanics library. There is a derivation of Hohmann transfers in the presence of a J2 term that describes the gravity of an oblate planet. That’s pretty cool. There is also an excellent chapter on motion around oblate planets, which is something I need to go back and study.
While I need to spend more time with this book, I regard it as a worthwhile addition to my bookshelf.
In Closing
I’ve enjoyed welcoming these books to the shelf and there is value in each of them. They’re a good distraction as I undertake the re-writing of Gravity Engine. Seven years after the initial version I now know much more about orbital mechanics and am looking forward to developing a much more streamlined Unity asset that will allow growth into more complex gravitational problems.
 = \int_0^{\phi} \sqrt{1-k^2 \sin{\theta}^2} d\theta")
 = s") find the value of phi (which is in the limit of the integral).
find the value of phi (which is in the limit of the integral). ^{2/3}") . The comparison of these is shown below.
. The comparison of these is shown below. 
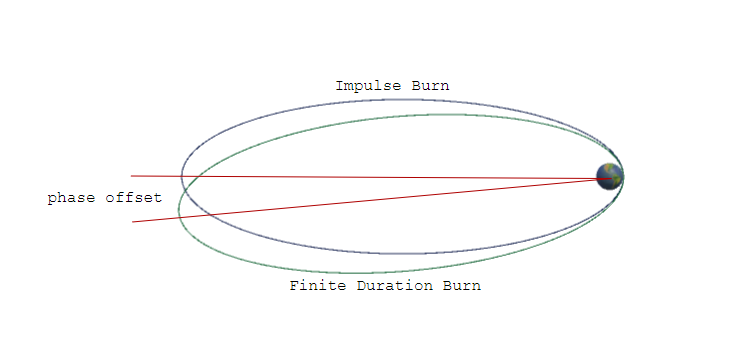
}{1+\cos \theta_F}")


 is NOT the same angle as
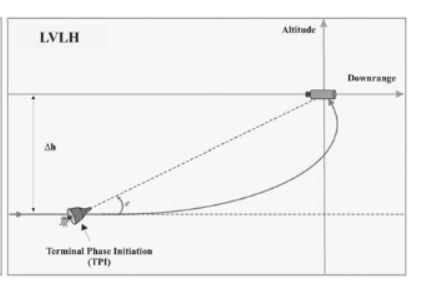
is NOT the same angle as  (f in the picture) however they can be related with a bit of geometry:
(f in the picture) however they can be related with a bit of geometry:
 .
.
{kind=link}